
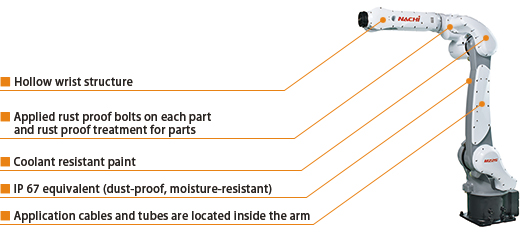
The MZ25 Mid-size Robot boasts a fast cycle time, ensuring efficient operation and maximizing productivity. Its hollow wrist design with internal cable routing minimizes interference and allows for a clean setup, even in tight spaces.
MZ25 Mid-size Robot Overview
|
MZ25 Mid-size Robot Adapts to any work environment with various standard equipment’s
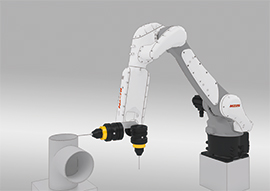
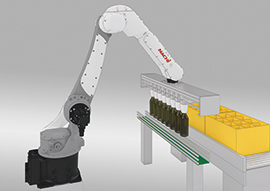
Application example


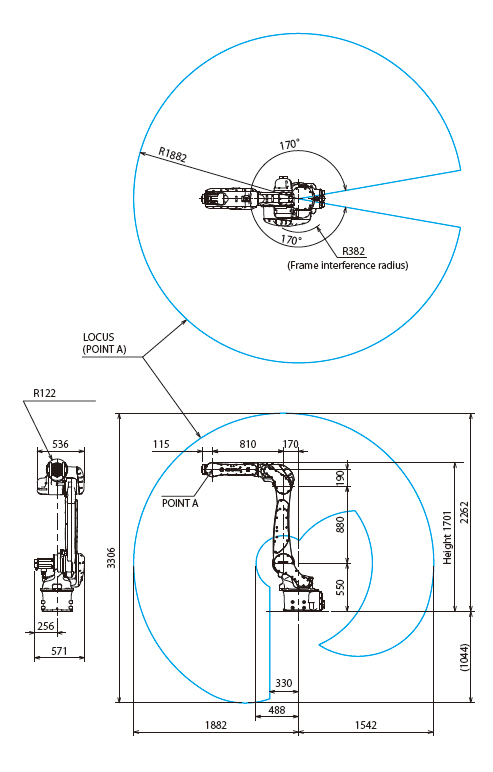
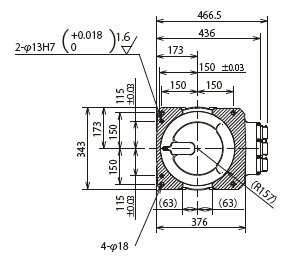
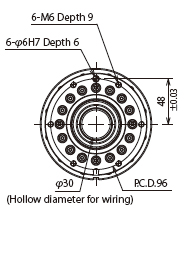
Dimentions and operating range
Specification
| Robot type | MZ25-01 | |||
|---|---|---|---|---|
| Structure | Articulated robot | |||
| Degree of Freedom | 6 | |||
| Maximum motion range | Arm | J1 | Swivel | ±2.97rad (±170°) |
| J2 | Forward/ Backward |
+1.83 to -2.62rad (+105 to -150°) | ||
| J3 | Upward/ Downward |
+5.04 to -2.81rad (+289 to -161°) | ||
| Wrist | J4 | Rotation2 | ±3.32rad (±190°) | |
| J5 | Bend | ±2.53rad (±145°) | ||
| J6 | Rotation1 | ±6.28rad (±360°) | ||
| Maximum Velocity*1 | Arm | J1 | Swivel | 3.67rad/s (210°/s) |
| J2 | Forward/ Backward |
3.23rad/s (185°/s) | ||
| J3 | Upward/ Downward |
4.71rad/s (270°/s) | ||
| Wrist | J4 | Rotation2 | 7.33rad/s (420°/s) | |
| J5 | Bend | 7.33rad/s (420°/s) | ||
| J6 | Rotation1 | 11.73rad/s (672°/s) | ||
| Maximum Payload | Wrist | 25kg | ||
| Maximum static load torque | J4 | Rotation2 | 52N·m | |
| J5 | Bend | 52N·m | ||
| J6 | Rotation1 | 32N·m | ||
| Maximum moment of inertia*2 | J4 | Rotation2 | 2.4kg·m2 | |
| J5 | Bend | 2.4kg·m2 | ||
| J6 | Rotation1 | 1.3kg·m2 | ||
| Maximum Reach | 1,882mm | |||
| Position repeatability*3 | ±0.05mm | |||
| Air tubes | IN : Ø6×1, OUT : Ø10×1 | |||
| Application cables | 24 wires (Including wires for optional valves) |
|||
| Mounting Condition | Floor / Inverted / Angle | |||
| Ambient Temperature | 0 to 45C°*4 | |||
| Ambient Humidity | 20 to 85%RH (No dew or frost allowed) |
|||
| Protection class | IP 67 equivalent (dust-proof, moisture-resistant) |
|||
| Robot weight | 250kg | |||
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
*1: The maximum velocity in the chart is the maximum value.
It will change depending on the operation program and the wrist load condition.
It will change depending on the operation program and the wrist load condition.
*2: Depends on wrist load condition
*3: JIS B 8432 conformance
*4: Using at 1000 m or lower sea level.
Ambient temperature has limitations when allowable altitude is exceeded
Ambient temperature has limitations when allowable altitude is exceeded




Reviews
There are no reviews yet.